第三届771771威尼斯.Cm“十大科技进展”评选结果揭晓。“十大科技进展”评选是学校科技工作改革中的一项重要举措,致力于打造学校高质量科研品牌,以科技创新推进科研工作高水平发展,发掘有潜力的成果,提升科研团队产出重大科研成果的积极性。
【项目名称】
冬奥六足机器人
【项目负责人】
高峰

【项目完成人】
高峰、齐臣坤、高岳、陈先宝、郭为忠、尹科、王梁雨、赵越、孙乔、孙竞
【项目完成单位】
771771威尼斯.Cm,上海智能制造功能平台有限公司

【项目简介】
为助力“科技冬奥”,高峰教授团队在国家重点研发计划“科技冬奥”重点专项的支持下,研发出滑雪和冰壶六足机器人,突破了机器人构型设计、环境感知、规划控制和人机交互等关键技术,体现了我国在该领域的自主创新能力。
(1)创新研发出世界首款六足滑雪机器人
滑雪对人的稳定性和灵活性要求极高,设计滑雪机器人极具挑战。研发的六足滑雪机器人突破了构型设计、环境感知、自主规划、稳定控制、人机交互等关键技术。六足滑雪机器人采用双板滑雪,中间的四条腿分成两组,每两条腿固定在一个滑雪板上,用于控制滑雪板的位置和姿态,两侧的两条腿分别加装了滑雪杖,具有模仿人实现点杖的功能。六足滑雪机器人的每个滑雪板具有五个自由度的运动功能,通过控制滑雪板的位姿可以实现滑雪的速度控制、转弯和制动等功能。六足滑雪机器人采用人机交互与机器人自律相结合的方式控制机器人身高、身体俯仰角、重心前后位置、重心左右位置、左右雪板夹角、左右腿高低、左右雪板前后位置等,实现机器人速度和转向控制。在滑雪场上,六足滑雪机器人在初级雪道和中级雪道完成了高速滑雪和避障安全控制,滑行速度、转弯技能、避障能力,以及稳定性、安全性、可靠性都得到了实际检验。

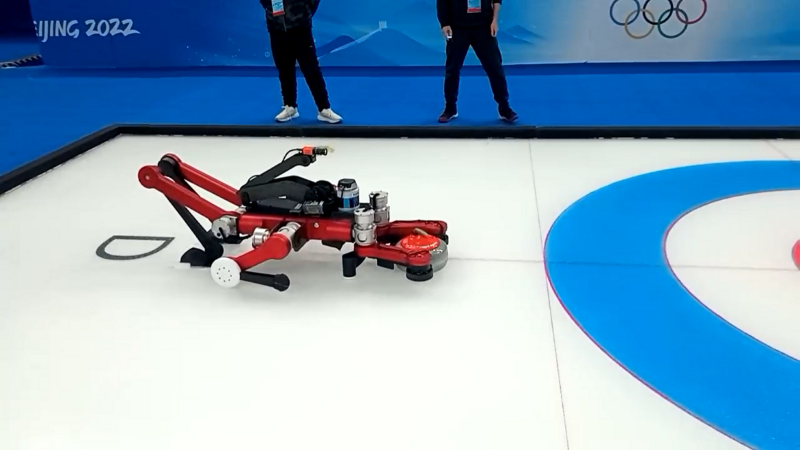
(2)创新研发出世界首款六足冰壶机器人
通过模仿冰壶运动员投掷冰壶的“行为特征”来设计和开发冰壶六足机器人面临多项挑战。研发的冰壶六足机器人解决了构型与驱动设计、冰壶位置测量、投壶控制等难题,建立了冰壶机器人行走和投掷两种构态转换方法,研发了基于视觉和激光的目标冰壶感知和瞄准技术,构建了机器人精准运动控制系统,实现了精准投掷和击打冰壶。该机器人具备人类投掷冰壶的行为功能,六条腿分为前、中、后三组,前部两腿为双手控制冰壶的方向和旋转速度,中部两腿和身体底部支撑滑行,后部两腿蹬起踏器。这是世界上首款模仿人蹬踏、支撑滑行、旋转冰壶行为方式的六足冰壶机器人。冰壶六足机器人在国家游泳中心(冰立方)顺利进行了击打冰壶展示。在展示过程中,六足冰壶机器人找到起踏器并识别目标冰壶位置和颜色,进而确定起始方位和滑行路线;机器人后腿蹬踩起踏器开始驱动机器人和冰壶滑行,到达预定位置和速度时,前腿再次推壶并旋转冰壶,控制冰壶投出位置、方向、速度和角速度,使冰壶靠惯性沿预计轨迹滑行,击中目标冰壶。演示中,机器人6次击打冰壶,全部击中。六足冰壶机器人具有视觉和力学感知能力,自主测量冰壶位置和蹬踏力,形成机器人行为规划和智能控制,实现了冰壶投掷运动的数字化。